Capture Force. Transfer Skill.
CONTACT captures the motion, force, and contact signals behind human dexterity — then translates them into training data, teleoperation control, and haptic feedback for robotic hands.
Built on patented exotendon technology, Maestro EP gives Physical AI teams access to the missing layer of human manipulation: force.





Contact CI is building a potentially critical component to enable the future of Physical AI and VR.
Contact CI's haptic glove is the missing piece we need for true telepresence hands.
Contact CI has convincingly simulated the sense of touch for VR and AR.
Thanks for the feels. Maestro is an amazing piece of haptic tech.
Robots can see hands move. They can track pose, objects, and trajectories. But skilled manipulation depends on more than motion. It depends on force.
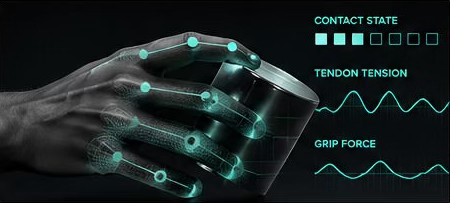
How hard did the operator grip? When did contact begin? How much resistance did the object create? When did the hand adjust, release, or compensate?
These are the signals that turn movement into skill.
CONTACT captures the missing force layer behind human dexterity.

Motion tells you what the hand did.
Force tells you how the skill happened.
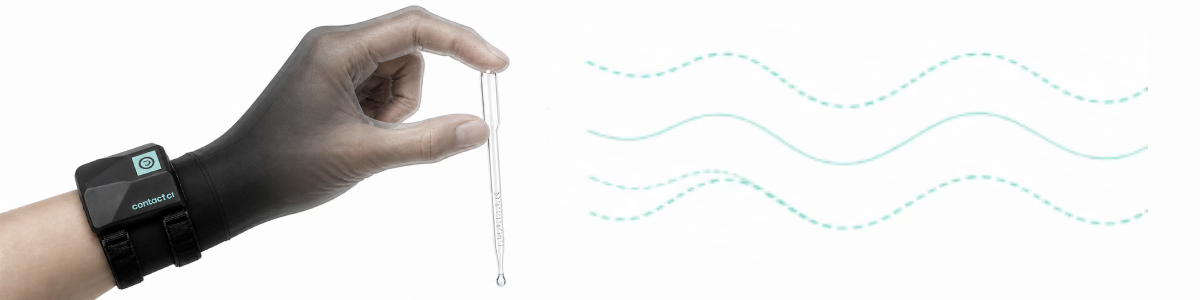
Traditional gloves track motion. Vibration gloves simulate contact. Rigid exoskeletons add bulk. Maestro EP uses CONTACT's patented exotendon architecture to capture and display force through tendon-based interaction with the fingers. Above: a wrist-module cutaway showing drive and routing; below: the production glove those same tendons feed.
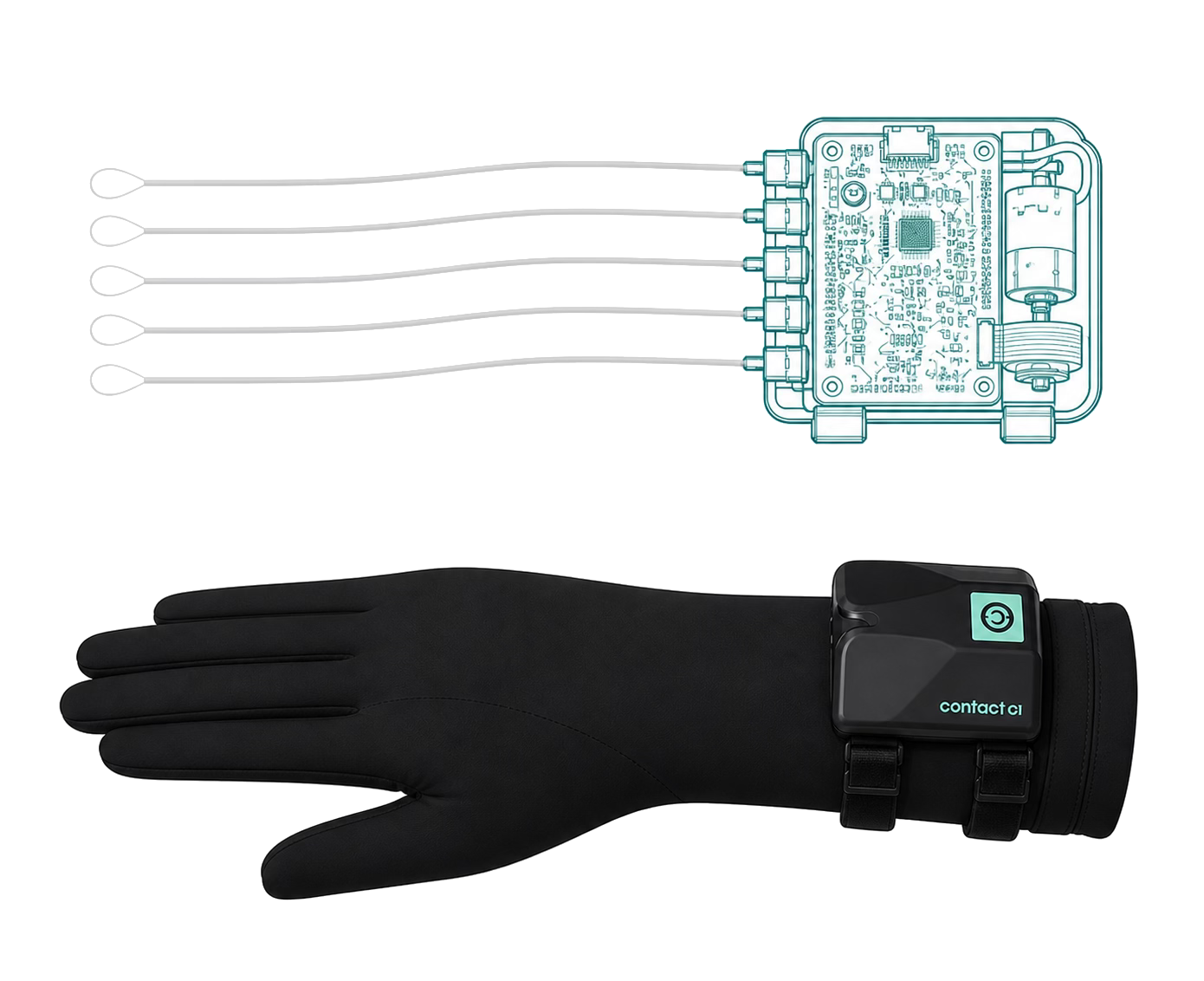
On-board compute, power, and wireless telemetry with motor-and-spool actuation at the wrist—tendon lines feed the fingers for independent force I/O. 6–8 hours of continuous-use battery life.
Ultra-low friction tendons route along the hand to mirror natural biomechanics, with per-finger paths for precise force sensing and haptic delivery—dynamic restriction and cues so operators feel contact, resistance, and constraint.
Move beyond pose tracking with force-relevant signals for manipulation, teleoperation, and training—and a modality path built for robustness under occlusion: lab-demonstrated full 23 DoF motion purely from tendons, brought toward product via sensor fusion with optical pipelines where XR-style tracking excels.
Avoid the bulk of rigid exoskeleton systems while preserving high-value haptic and dexterity signals.
Tendon-based haptic systems, force feedback, and hand-interface architectures.
Selected patents: U.S. Patent 10,137,362 B2 · U.S. Patent 11,422,624 B2
CONTACT helps Physical AI teams capture human dexterity, translate it into robot-ready data, control robots through haptic teleoperation, and turn human intervention into better training data.



Physical AI programs using imitation learning need demonstrations that go beyond video, pose, and object labels. Maestro EP captures the hidden mechanics of skilled manipulation: how the hand moves, when contact occurs, how resistance changes, and how force is applied through the fingers—so policies learn from real contact, not guesswork.

Record skilled operators performing real manipulation tasks.
Capture grip, resistance, contact, correction, and release.
Export structured manipulation data for training and analysis.
Reveal interaction dynamics cameras alone cannot capture.
Skilled operator performs task with Maestro EP.
Fine-grained force, motion, contact, and correction data captured.
Time-synchronized, force-rich data ready for use.
Learn dexterous manipulation from real interaction data.
Remote manipulation breaks down when operators have to guess what the robot is touching.
CONTACT gives human operators force feedback from robotic interaction, helping them adjust grip, avoid over-compression, and complete delicate tasks with greater control.
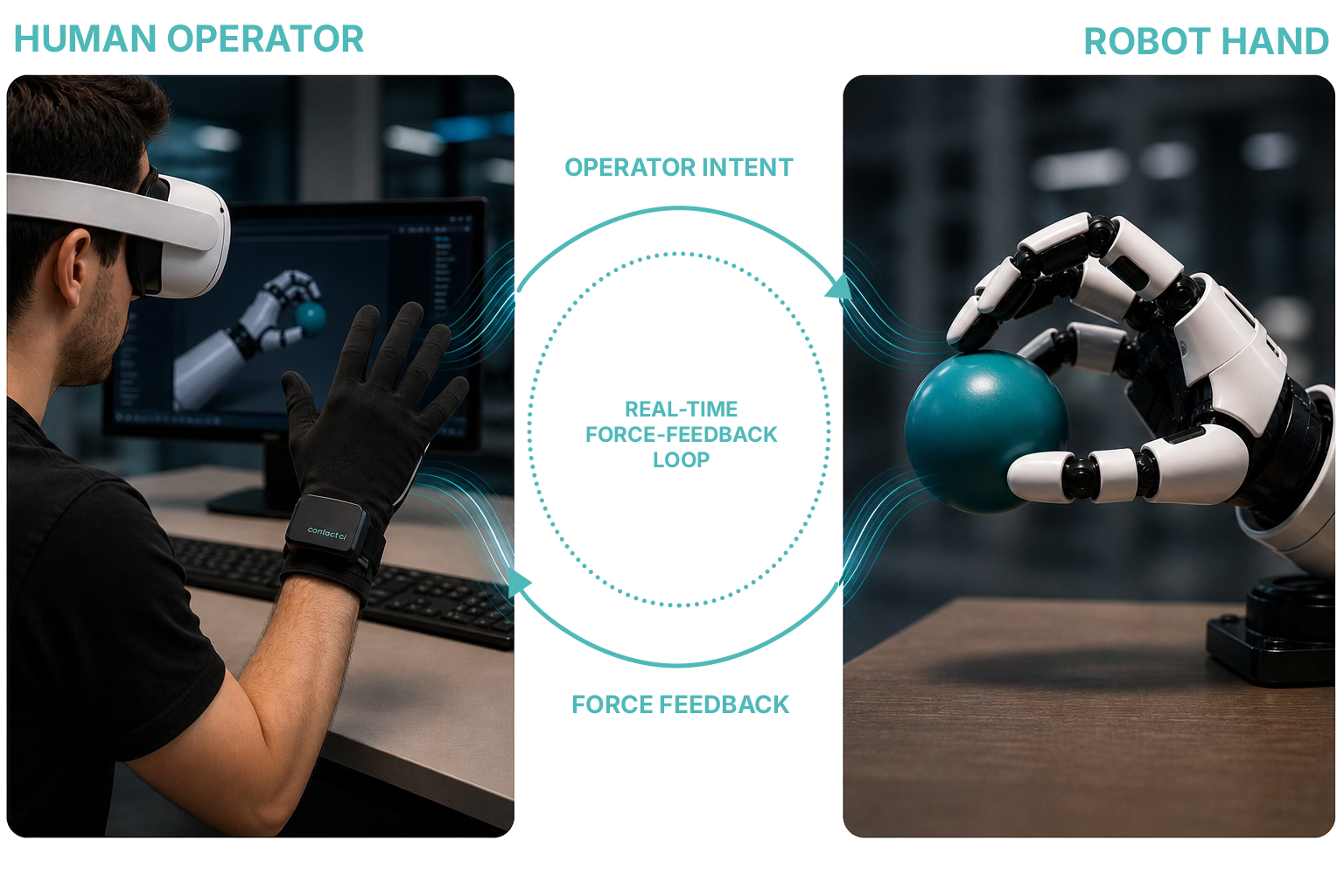
Tactile feedback while controlling remote manipulators.
Prevent crushing, slipping, or mishandling.
Capture corrections as reusable training data.
Low-latency force/haptic feedback for contact-rich tasks.
In XR, visuals alone are not enough—operators need to feel contact, load, and constraint the way they would on real equipment. Maestro EP brings finger-level force into headset-based training so squads and technicians can rehearse high-stakes procedures, build muscle memory, and log performance in repeatable virtual scenarios before they ever touch the live task.


Built for real-world use in high-stakes environments.
ITAR-ready, enterprise secure, and deployment flexible.
Force feedback improves performance, retention, and task success.
Customer-driven roadmap with ongoing innovation.
Wearable narrative: The Exotendon advantage. Full specification tables live on the tech specs page. Integration: Maestro SDK.
Unity, Unreal, and native C++, with finger-level authoring and Contact CI Manager / Service on Windows. Deep tables and licensing notes on the SDK page; hardware figures in tech specs.
Maestro EP with CONTACT captures the force layer behind human dexterity and delivers it where it matters — across the full Physical AI lifecycle.







From data to deployment, CONTACT is the force layer for every step.
Human dexterity
Force & contact
Teleoperate & train
Real-world impact
Whether you are training dexterous models, teleoperating robotic hands, or capturing human manipulation data, CONTACT gives your team access to the missing force signal behind skilled touch.

Capture synchronized kinematics, contact, and continuous force data at scale.
Learn moreBidirectional force feedback enables natural, precise, and confident remote manipulation.
Learn moreEngine and native SDKs with Contact CI Manager / Service on Windows.
Learn moreTalk to CONTACT
We'll respond within one business day.
Received
Your message is on its way to the CONTACT team.